https://www.marinelink.com/news/autonomous-ships-imo-completes-regulatory-487916
As the maritime industry continues to develop and test the technologies required for safe autonomous vessel operations, many regulatory questions have remained.
Setting out to help answer some of these questions, the International Maritime Organization’s (IMO) Maritime Safety Committee (MSC) has recently completed a regulatory scoping exercise to analyze relevant ship safety treaties, in order to assess how maritime autonomous surface ships (MASS) could be regulated.
The scoping exercise was initiated in 2017 to determine how safe, secure and environmentally sound MASS operations might be addressed in IMO instruments, ad its completion represents a first step, paving the way to focused discussions to ensure that regulation will keep pace with technological developments, the IMO said.
The exercise involved assessing a substantial number of IMO treaty instruments under the remit of the MSC and identifying provisions which applied to MASS and prevented MASS operations; or applied to MASS and do not prevent MASS operations and require no actions; or applied to MASS and do not prevent MASS operations but may need to be amended or clarified, and/or may contain gaps; or have no application to MASS operations.
Varying degrees of autonomy were considered, including crewed ship with automated processes and decision support (Degree One), remotely controlled ship with seafarers on board (Degree Two), remotely controlled ship without seafarers on board (Degree Three) and fully autonomous ship (Degree Four).
 (Image: ASKO)
(Image: ASKO)
Safety treaties assessed include the SOLAS Convention and various codes made mandatory under SOLAS (Casualty Investigation, Enhanced Survey Programme (ESP), Fire Safety Systems (FSS), Fire Test Procedures (FTP), Bulk Chemical (IBC), Gas Carrier (IGC), Solid Bulk Cargoes (IMSBC), Dangerous Goods (IMDG), Carriage of Irradiated Nuclear Fuel (INF), Intact Stability, International Safety Management (ISM), Ship and Port Facility Security (ISPS), Grain, Polar, Recognized Organizations (RO)); collision regulations (COLREG); Load Lines Convention and 1988 Protocol; Convention on Safe Containers (CSC); STCW Convention and Code, as well as STCW-F Convention; search and rescue (1979 SAR Convention); tonnage measurement (Tonnage 1969) and the Code of Safe Practice for Cargo Stowage and Securing (CSS Code) and IMO Instruments Implementation Code (III Code).
The outcome of the regulatory scoping exercise was discussed and completed by the MASS Working Group which met during MSC 103, in May 2021.
For each provision, the exercise identified whether MASS could potentially be regulated by: equivalences as provided for by the instruments or developing interpretations; and/or amending existing instruments; and/or developing a new instrument; or none of the above as a result of the analysis.
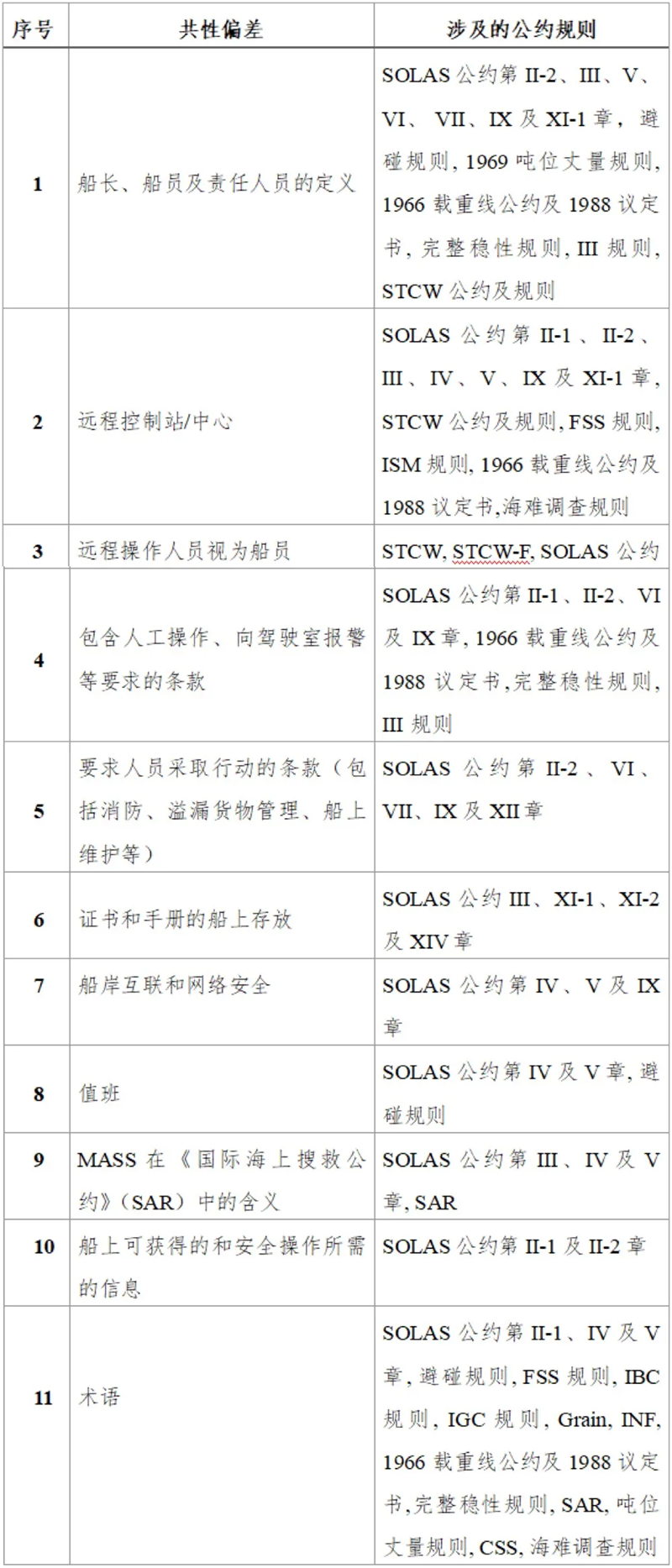
The outcome highlights a number of high-priority issues, cutting across several instruments, that would need to be addressed at a policy level to determine future work, the IMO said.
These involve the development of MASS terminology and definitions, including an internationally agreed definition of MASS and clarifying the meaning of the term “master”, “crew” or “responsible person”, particularly in Degrees Three (remotely controlled ship) and Four (fully autonomous ship).
Other key issues include addressing the functional and operational requirements of the remote-control station/center and the possible designation of a remote operator as seafarer.
Further common potential gaps and themes identified across several safety treaties related to provisions containing manual operations and alarms on the bridge; provisions related to actions by personnel (such as firefighting, cargoes stowage and securing and maintenance); watchkeeping; implications for search and rescue; and information required to be on board for safe operation.
The Committee noted that the best way forward to address MASS in the IMO regulatory framework could, preferably, be in a holistic manner through the development of a goal-based MASS instrument. Such an instrument could take the form of a “MASS Code”, with goal(s), functional requirements and corresponding regulations, suitable for all four degrees of autonomy, and addressing the various gaps and themes identified by the RSE.
The Committee invited Member States to submit proposals on how to achieve the best way forward to a future session of the MSC.
The outcome of the MSC’s regulatory scoping exercise, as approved by the Committee, including the full analysis of treaties, can be found as an annex to the report of MSC 103 (MSC 103/21/Add.1, annex 8) and can also be found in circular MSC.1/Circ.1639 (Outcome of the Regulatory Scoping Exercise for the use of Maritime Autonomous Surface Ships (MASS)).
IMO’s Legal and Facilitation Committees are currently also in the process of conducting regulatory scoping exercises on conventions under their purview.